安川机器人控制组和坐标系
1、控制组
在安川机器人DX200中,会将一根或多根操作对象轴归纳在一起,称之为“控制组”,其分为机器人、基座和工装。“机器人”指机器人本身,“基座”可以使整个机器人平行移动,“工装”用于其他夹具和工具。另外,基座和工装也称作外部轴。

2、坐标系
对安川机器人进行轴操作时,有下列坐标系。
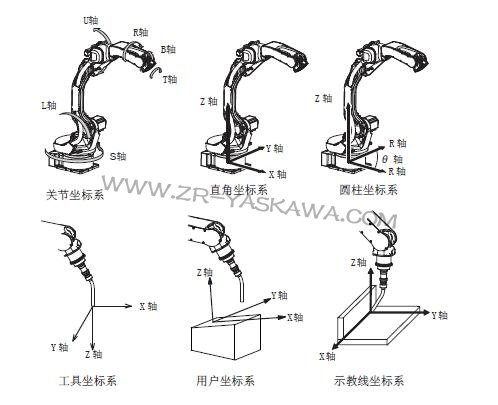
关节坐标系
工业机器人的各个轴单独运动,也叫关节坐标系。
直角坐标系
安川DX200机器人的前端平行于机器人的轴、Y轴和z轴运动。
圆柱坐标系
安川yaskawa机器人的前端在8轴中围绕S轴运动,R轴平行L轴臂动作。
z轴的运动情况和直角坐标系相同。
工具坐标系
把在安川DX200机器人手腕法兰盘安装的工具的有效方向作为z轴,并把工具的前端定义为XYZ直角坐标。机器人前端围绕此坐标平行动作。
用户坐标
在任意位置定义XYZ直角坐标。机器人前端围绕此坐标平行动作。
工具坐标系
把在机器人手腕法兰盘安装的工具的有效方向作为2轴,并把工具的前端定义为XYz直角坐标。机器人前端围绕此坐标平行动作。
用户坐标
在任意位置定义XYZ直角坐标。机器人前端围绕此坐标平行动作。
安川机器人示教线坐标
从2个程序点和安川机器人的z轴方向设定XYZ直角坐标。机器人前端围绕此坐标平行动作。示教线坐标只能用于弧焊。