
YASKAWA机器人XRC控制柜
主电源开关和门锁位于XRC控制柜的面板上,把安川机械手示教盒挂在控制柜右上方,面板位于控制柜的柜门上,如图所示。
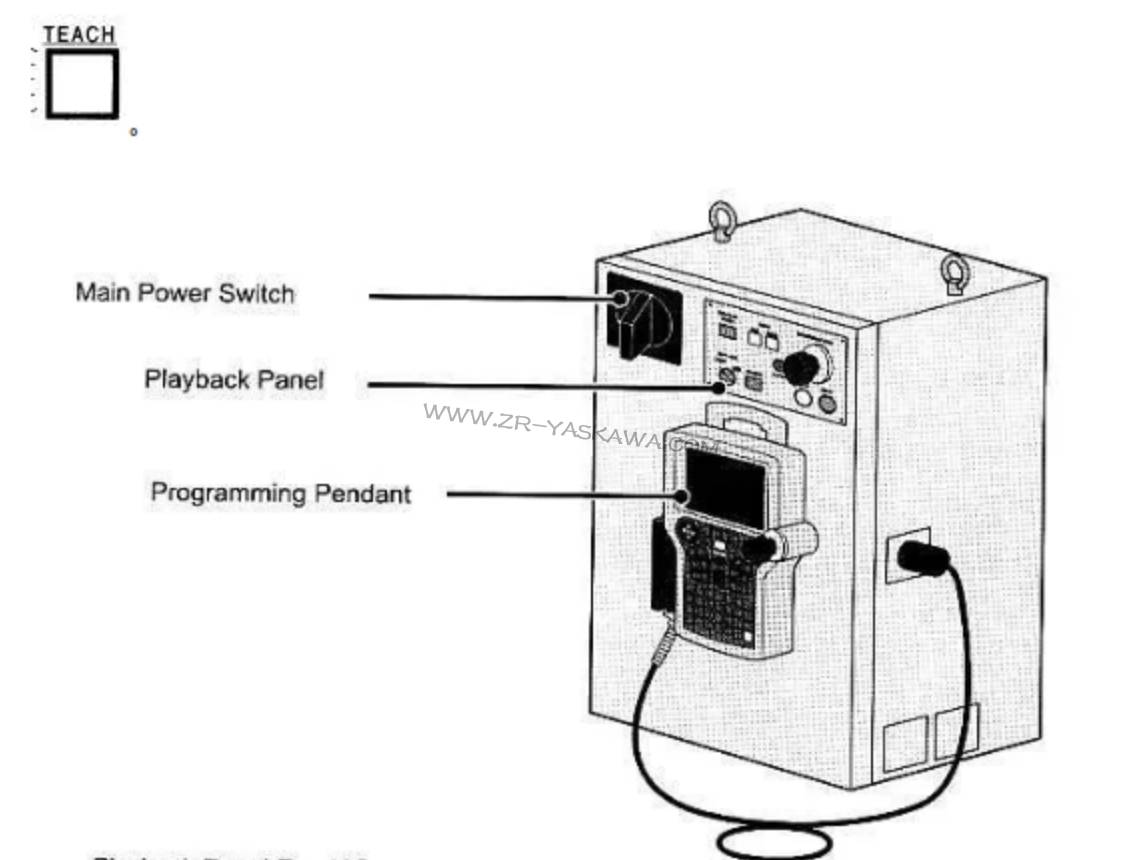
面板上面的按钮都是用圆括号以及方括号里面的文字表示。[TEACH]表示再现面板上的示教按钮 。
操作顺序
按下列操作顺序来使用安川机器人:
· 开启XRC控制柜
· 示教机械人一种作业
· 机械人自动完成作业(称为“ok”)
· 当完成作业后,关闭电源。
当主电源开启后,系统将自检,并且在示教盒屏幕上显示开启信息。
一、安川机器人故障诊断
1. 初步检查:检查YASKAWA机械手控制柜是否有明显的物理损伤,连接线缆是否牢固,电源是否正常供应等。
2. 系统复位:尝试进行系统复位,以排除由于软件错误导致的临时性问题。
3. 软件检测:使用专用的软件工具检测控制柜内的操作系统和应用软件,确保没有病毒感染或软件冲突。
二、检测与维修
1. 主板、电源模块
- 如果软件层面无异常,则需要进一步检查硬件部分,如主板、电源模块等是否工作正常。
2. 元器件更换
- 在确认yaskawa机械臂故障元件后,对其进行更换测试。优先更换可能出错的部分,例如冷却风扇、电源供应单元等。

3. 线路
- 检查安川工业机械手控制柜内部的线路,看是否有松动、断裂或接触不良等现象。
- 对发现有问题的线路进行修复或更换,并确保线路与元件之间的连接正常。
三、yaskawa机器人维修解决方案
1. 电机过热:清理散热器上的灰尘,检查冷却风扇是否正常工作。必要时替换散热不良的部件。
2. 通讯故障:检查通讯线路是否损坏或松动,重新插拔并进行通讯测试。
3. 电源问题:查看一下YASKAWA机械臂电源线路是否接触良好,保险丝是否熔断。若有熔断情况,更换保险丝并追踪短路原因。



