
安川机器人CPU电路板脱机检修指在脱开变频器主电路后的,对电源/驱动板的单独上电检修,检修好之后确认驱动板所有故障排除再上机测试,以确保IGBT的安全,先看看一个测试数据表
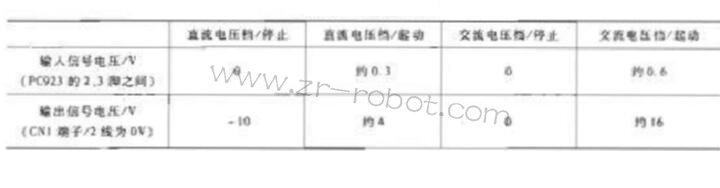
1.用数字式万用表,则能得出表中的数据。指针式万用表的交流电压档,也能显示偏大的直流电压值,故在停机状态,仍显示一定电压值,但在起动状态,表笔马上反向指示-说明指针式万用表的交流电压档,虽能测出信号电压的峰值,但仍能指示出电压的极性。
2.当驱动供电电压为15V和-7V时,检测得出的输出侧的电压值也相应降低。
3.因电路元器件的离散性、各路驱动电源电压的差异以及不同型号变频器PWM(SPWM)脉冲波形的差异,测量所得出的动态电压值也会有较大的差异。如从触发端子测得交流电压值,其峰值往往大致接近供电电压值,一般只要满足在13V以上,IGBT就能可靠工作,六路脉冲电压的幅度也有所差异。所以即使同一种采用同一种驱动IC的不同型号的变频器,也不可能测得一样的结果。我们不必从数值的精确度上太过讲究,可完全从动、静态电压值、电压极性的明显变化上,判断出驱动电路的工作状态。
每一路驱动电路,都可以直接从驱动IC的两个输入脚检测输入信号,从驱动信号的输出端子(模块触发端子)检测输出信号。
若输人信号电压为零,则往前检测从CPU至驱动IC的信号传输电路,检测内容请见第7章脉冲信号的前级电路检测;若有输入信号,CN1附、CN22的输出信号端子则可能有以下几种情况:
1)用50V交流档测PC923的6脚电压,若过低(如仅为10V),对比测量一下PC929 的输入2、 3脚电压,若偏低,则往前检测从至驱动忆的信号传输电路,检测内容请见第7章相关章节;如正常,故障可能为PC923内部输出电路的VT1低效,代换PC923。
2)检测PC923的6脚交流电压值,达15V以上(15V供电下,以上即为正常值), 故障原因为R65、 有阻值变大现象,更换。或VT11低效,更换。
若触发端子仍为-10V的固定负压。测PC23的6脚,也为-10V,驱动IC内部VT2 击穿,代换;测PC923的6脚有4V左右的正电压,故障为驱动IC后置放大器的V11短路,更换。 以上检查,只是检测出驱动电路输出的脉冲电压幅度没有问题,但下一个驱动电路无问题的结论还为时过早。还需验证驱动电路的电流(功率输出能力)。



