
安川机器人CPU电路板故障维修
(1)静态检测 电路处于静止状态时,相对于+5V供电的地端,PC2的2、 3脚电压都为5V,直接测量2、 3脚之间电压差为以驱动电源的0V为0电位参考点,IGBT触发引线端子的1线应为-10V。 PC923、PC929的脉冲输出脚和后置放大器的中点电压都为-10V.

检测CN1化端子的1线为0V,故障原因有:驱动电源稳压二极管击穿短路;栅极电阻V91开路。 检测CN1端子的1线为18V左右,故障原因有:PC2的后置放大电路中的VT10短路;PC2内部输出电路中的VT1短路;检查PC2的2、 3脚如有电压输人,如1V、2V、故障原因为前级信号电路故障,使PC2形成了输人电流的通路。
(2)动态检测 电路静态时测得围端子1线上有正常的-10V截止电压,及测量各静态工作点基本正常(其实各检测点都表现为供电电压),要进一步检查动态一一对脉冲信号的传输能力, 验证电路确无故障或使隐蔽故障暴露出来。 但接着碰到了麻烦事,因为在检修中电源/驱动板与主电路已经脱开,CN1、CN2触发端子是空置的,并未接入IGBT,而且在未查明驱动电路是否工作正常之前,也是绝不允许在IGBT接入530V直流供电的情况下,连接驱动电路并检查驱动电路的故障的。
因为IGBT的脱开,驱动电路输出的脉冲无论正常与否,只要按一下操作面板的起动(FWD)或运行(RUN)按键,操作显示面板即跳出OC故障。原因在于驱动芯片PC929在脉冲信号传输期间,PC929的9脚内部电路与外部元件构成的IGBT管压降检测电路,因IGBT的未接入(相当于开路),而检测到极大的管压降信号,而向CPU报出OC信号,CPU采取了停机保护措施。必须采取相应手段,屏蔽掉驱动电路对IGBT管压降检测功能,令CPU正常发送六路脉冲,以利驱动电路的进一步检修。看下图电路——PC929驱动电路的IGBT管压降检测等效电路图:
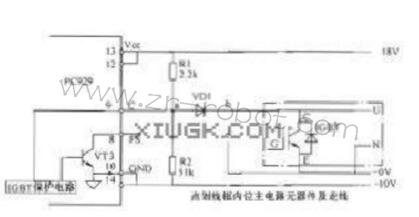
如果单纯将OC信号切断,如将图4、9中的PC4开路或短接PC2的1、2脚,以中断OC信号的输出,固然可以令CPU不停止脉冲信号的输出,但PC929中IGBT保护电路还处于起控状态,PC929仍无法正常输出驱动脉冲信号。正确的做法是:短接上图b、c点,即将D1的负极与OV供电引出线短接,人为造成“IGBT的正常导通状态”,“糊弄”一下IBGT管压降检测电路,使之在激励脉冲作用期间,能一直检测到IGBT的“正常状态”,内部保护电路不起控。 在检修所有变频器的驱动电路板时,只有驱动电路本身有IBGT(管压降检测)保护电路,我们都可以找出上图电路中的b、c点并予以短接,就可以将驱动电路OC故障的报警功能屏蔽掉,对驱动电路进行脉冲传输状态的检查了。



